CAPÍTULO
II (misceláneo)
El
MICROCONTROLADOR PIC12F675 DE LA INDUSTRIA MICROCHIP
Comenzaré
con este párrafo:
Quien cree saber mucho, ignora lo suficiente. Aun así, nunca dudes de tu enorme capacidad de
lograr tus propósitos. De ti depende
creer en los demás, incluso en Dios; pero no dudes en recurrir por sus ayudas y
de agradecer y retribuir apropiadamente a quienes las ofrecen. Siempre habrá
quien desee ayudarte. Solo, andarías lejos con empeño y esfuerzos, quizás, pero,
entre varios, la carga se reparte a menos, las penas se empequeñecen y las
alegrías se disfrutan mejor compartiéndolas.
Es de
vital importancia destacar algunas sugerencias que podrían ayudar a que el
microcontrolador no sea afectado por ‘extrañas e inexplicables anomalías’ que,
por lo general, no faltan como un pelo entre el salcocho. Lo normal es que
nuestro interés se enfoque tan sólo en el funcionamiento inmediato, y olvidamos
que las circunstancias varían con el tiempo, y son las que determinarán la
efectividad o no de los proyectos.
Por
tanto, el microcontrolador podría ser afectado por situaciones no tan perceptibles:
a) Por una mala regulación y filtrado deficiente
de la energía de alimentación.
b)
Por las
radiaciones provenientes de: cables eléctricos cercanos, transmisiones radioeléctricas
(como las de los celulares), maquinarias eléctricas en funcionamiento, chasquidos
de motores, contactores… y situaciones similares.
c)
Por variaciones
extremas de temperatura y humedad. Y el polvo.
d) Por movimientos bruscos del circuito, los
cuales provocarían fallas en el conexionado.
Podrían presentarse una amplia variedad de
situaciones no tan comunes. De las ya citadas, se podrían encontrar algunas
soluciones para minimizarlas:
a)
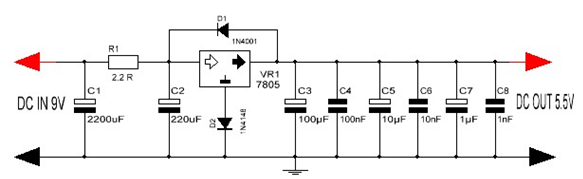
No es
suficiente utilizar un regulador de voltaje de 5 voltios de calidad garantizada
para alimentar nuestro microcontrolador, también debemos tomar en cuenta que la
rectificación y el filtrado sean el necesario para un buen rizado de la
corriente. Los actuales reguladores monolíticos de voltaje (como el 7805) están
dando problemas al soldarlos y cuando el nivel de voltaje de entrada supera ligeramente
los 20V. Incluso, traen la aleta más delgada. Lo recomendable es soldar y
esperar a que se enfríe cada pin, usar un resistor de amortiguamiento en la
entrada (pin 1) y poner capacitores de
10uF tanto en la entrada (pin 1) como en la salida (pin 3).
b)
Para
evitar que los pines no utilizados actúen como antenas receptoras de ruidos, lo
apropiado es poner un resistor de 4K7 desde el pin no usado al pin1 (los 5V).
Algo adicional y más seguro es poner una lámina de papel aluminio o cobre debidamente
aislada y aterrizada al negativo, sobre o debajo del microprocesador. Nunca he
apreciado la diferencia. Las conexiones de alambre o impresas en cualquier tipo
de circuito deben ser siempre cortas y que no pasen próximas a corrientes
alternas. Dicho de otro modo, los alambres que llevan corriente alterna no se
empaquetan con los que llevan corriente continua o directa.
c)
Una
cajita plástica para contener la tarjeta es una práctica muy usada para
proteger nuestros circuitos de la humedad, el polvo y las manipulaciones
mecánicas inapropiadas. Se me ocurre que si se forra interiormente la cajita
con papel aluminio aterrizado al negativo serviría mejor como protección contra
las radiaciones.
d)
Las
interferencias no radiadas, las que penetran modulando el voltaje de alimentación del
microcontrolador, provocan deficiencias
en el convertidor análogo/digital, y se podrían eliminar colocando un pequeño capacitor
de 0.1 uF en paralelo con los pines de alimentación del dispositivo. Uno de
0.01uF tanto en la entrada y la salida del regulador de 5V aumentaría la
protección anti ruidos.

Los pines del
microcontrolador destinados a ser
disparados por una entrada de voltaje mayor de 5V deben obligatoriamente
contener en serie un resistor del valor apropiado y un diodo Zener de 5.1V
desde el pin a tierra. Esto es factible para casos donde el voltaje no supere
los 12V. Lo recomendado en todos los casos es utilizar entradas optoacopladas
para evitar errores y daños.

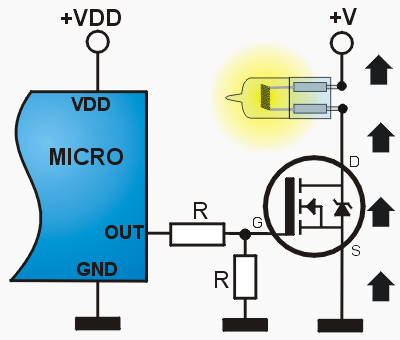
El consumo de las cargas
conectadas a cada salida del microcontrolador no debe superar jamás los 25mA.
Los valores de los resistores deben ser calculados y escogidos para no superar
dicho nivel de corriente. Para activar dispositivos que exijan mayor corriente
es obligatorio utilizar transistores o circuitos integrados driver como
mediadores; y tanto más si la carga funciona con un nivel de voltaje mayor a
los 5V. Si la carga va a ser alimentada con un voltaje mayor a 12Vdc es
necesario optoacoplar la salida del microcontrolador con la entrada del
dispositivo driver.