CAPÍTULO II
El MICROCONTROLADOR
PIC12F675 DE LA INDUSTRIA MICROCHIP
Considero que el microprocesador más
popular de la Microchip ha
sido siempre el pobretón, barato y eficiente PIC16F84. Pobre, porque no
posee los periféricos internos de otros de la categoría gama media. Es
barato, aunque no el que más; pero hasta ‘se dice’ que la compañía regala
muestras a las instituciones educativas que así lo soliciten. Es eficiente, ya
que por poco dinero se obtienen 16 pines, sin los dos de alimentación, muy
útiles para experimentar en pequeños proyectos educativos.
Ahora, cuando se habla de un
‘micro’ de gama baja (‘enano’) realmente versátil para pequeños
proyectos no tan simplones, tenemos que mencionar al PIC12F675; al cual dedicaremos gran parte de nuestro estudio por
ofrecer una arquitectura ergonómica y no tan compleja para el aprendizaje sin etiquetarse
como ‘pobre’.
El nombre de PIC no es en realidad para algunos un acrónimo, pero se consideran varias
posibilidades: a) Peripheral Interface Controller (controlador de
interfaz periférica), b) Programmable Integrated Circuit (circuito
integrado programable), y c) Programmable Interrupt Controller
(controlador programable de interrupciones). Sin importar cuál es el acrónimo
correcto, si es que lo hay, todos los ya mencionados definen correctamente a
los microcontroladores. El número “12”
del nombre se refiere al patrón binario de 12 bits que emplea para las 35
instrucciones; la “F” alude a la
memoria de programa EEPROM tipo flash que posee; y el “675” no es más que un apellido para diferenciarlo de otros códigos
de manufactura.
El lenguaje que entienden los
‘micros’ (y los computadores) es el binario, y para programarlos usando como
intermedio un lenguaje traductor de alto nivel, propio para informáticos como
el Basic, no se requiere conocer a
profundidad todas las características específicas del dispositivo; no así si se
va a trabajar con el lenguaje de bajo nivel Assembler (Ensamblador), más adecuado y eficiente para expertos en
electrónica; donde cada registro (register) debe ser configurado y
utilizado directamente bit a bit.
Lo primero que encontramos en el data
sheet (hoja de datos) es que se trata de un microcontrolador tecnología CMOS (desarrollada por Fairchild Semiconductor
y popularizada por RCA) (Complementary Metal Oxide Semiconductor, ‘semiconductor
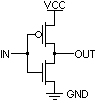
complementario de óxido de metal) de 8
pines (alfileres, patas), y que todos los
registros son de 8 bits (ocho unidades binarias), a excepción de las instrucciones que son de 12 bits. En la gráfica se muestra la configuración
simbólica de una salida con tecnología CMOS:
La CPU utiliza una arquitectura computacional RISC (Reduced Instruction Set Computing, ‘computador de
conjunto de instrucciones reducidas’), que en assembler son 35 en total para este
PIC y la mayoría de ellos; que, con
un poco de ingenio, son suficientes para realizar maravillas increíbles.

Observando el diagrama de pines,
que es parecido al del primo PIC12F629
que también posee módulo comparador (OPAMs,
amplificadores operacionales), pero no convertidor A/D (analógico-digital), se
podrían explicar mejor muchas de las características externas e internas del PIC12F675:
PIN
|
NOMBRE
|
FUNCIÓN
|
ENTRADA
|
SALIDA
|
DESCRIPCIÓN
|
1
|
Vdd
|
Vdd
|
Energía
|
-
|
Alimentación positiva de 2.0V a 5.5V regulados.
|
2
|
GP5/T1CKI/OSC1/CLKIN
|
GP5
|
CMOS
25mA máximos
|
Entrada o salida con lectura y escritura, resistor pull-up e interrupción por cambio de estado
(IOC) programables.
|
|
T1CKI
|
ST
|
-
|
Entrada de reloj del
TMR1
|
||
OSC1
|
XTAL
|
-
|
Pin 1 para cristal
o resonador
|
||
CLKIN
|
-
|
Entrada ‘exterior’
de reloj, conector para el oscilador RC.
|
|||
3
|
GP4/AN3/T1G/OSC2/CLKOUT
|
GP4
|
CMOS
25mA máximos
|
Entrada o salida con lectura y escritura, resistor pull-up e interrupción por cambio de estado
(IOC) programables.
|
|
AN3
|
AN
|
-
|
Entrada A/D canal
3
|
||
T1G
|
ST (Schmitt Trigger)
|
-
|
Entrada disparo del
TIMER 1
|
||
OSC2
|
-
|
XTAL
|
Pin 2 para cristal
o resonador
|
||
CLKOUT
|
-
|
CMOS
|
Salida de reloj Fosc/4
|
||
4
|
GP3/MCLR/Vpp
|
GP3
|
-
|
Sólo entrada con lectura, interrupción por cambio de estado
(IOC) programables.
|
|
MCLR
|
-
|
Master Clear (limpiador
maestro)
|
|||
Vpp
|
HV (High Voltage)
|
-
|
Voltaje de programación de
13.5V máximos
|
||
5
|
GP2/AN2/T0CKI/INT/COUT
|
GP2
|
CMOS
25mA máximos
|
Entrada o salida con lectura y escritura, resistor pull-up e interrupción por cambio de estado
(IOC) programables.
|
|
AN2
|
AN
|
-
|
Entrada A/D canal
2
|
||
T0CKI
|
-
|
Entrada del TIMER cero
|
|||
INT
|
ST
|
-
|
Entrada interrupción
‘externa’
|
||
COUT
|
-
|
-
|
Salida del comparador
|
||
6
|
GP1/AN1/CIN-/VREF/ICSPCLK
|
GP1
|
CMOS
25mA máximos
|
Entrada o salida con lectura y escritura, resistor pull-up e interrupción por cambio de estado
(IOC) programables.
|
|
AN1
|
AN
|
-
|
Entrada A/D canal
1
|
||
CIN-
|
AN
|
-
|
Entrada análoga e inversora
del comparador
|
||
Vref
|
AN
|
-
|
Referencia externa
de voltaje
|
||
ICSPCLK
|
ST (Schmitt Trigger)
|
-
|
Entrada de reloj para
la programación serial
|
||
7
|
GP0/AN0/CIN+/ICSPDAT
|
GP0
|
CMOS
25mA máximos
|
Entrada o salida con lectura y escritura, resistor pull-up e interrupción por cambio de estado
(IOC) programables.
|
|
AN0
|
AN
|
-
|
Entrada A/D canal
0
|
||
CIN+
|
AN
|
-
|
Entrada análoga no
inversora del comparador
|
||
ICSPDAT
|
-
|
Entrada y salida de
datos para la programación serial
|
|||
8
|
Vss
|
Vss
|
Energía
|
-
|
Conexión a tierra (negativo)
|
Las entradas del pic con disparador
Schmitt aprovechan la histéresis (espacio de operación sobre un umbral superior
y bajo un umbral inferior de voltajes predeterminados por el diseño) de estos amplificadores
operacionales para acondicionar señales analógicas, o digitales infectadas de ruidos,
a digitales puras con las cuales opera propiamente el microcontrolador.

La alta impedancia de las salidas con
tecnología CMOS permite que el consumo en reposo, y el general del dispositivo microcontrolador,
sea cero o mínimo y que pueda operar con voltajes muy bajos hasta 2.0V. La característica
regenerativa del CMOS permite restaurar las señales débiles que estén dentro de
los umbrales de operación. El diseño es simple al no requerir dispositivos pasivos;
y la densidad de integración tecnológica de los componentes es muy alta y barata.
Las desventajas de la
tecnología CMOS, esto es el efecto capacitivo, el efecto de enganche (latch-up),
entre otras, son compensadas en la fabricación de los microcontroladores utilizando
la tecnología TTL (transistor-transistor
logic; iniciada por Sylvania y popularizada por Signetics) para
las entradas que así lo requieren. Debido al estrecho rango de alimentación de esta
tecnología es que básicamente los microcontroladores operan a 5.5V máximos.

La configuración opcional del resistor pull-up (tirar hacia arriba) de entrada,
no para salida, de los pines (a excepción del pin 4, GP3) permite que estos operen
en triestados: 0, 1 y Z (alta impedancia). La opción de alta impedancia permite
un acoplamiento óptimo con las señales provenientes de otros dispositivos, especialmente
aquellos en transmisión serial.
No hay comentarios:
Publicar un comentario